
科研级仿真实验环境
- 随时随地在线实验
-
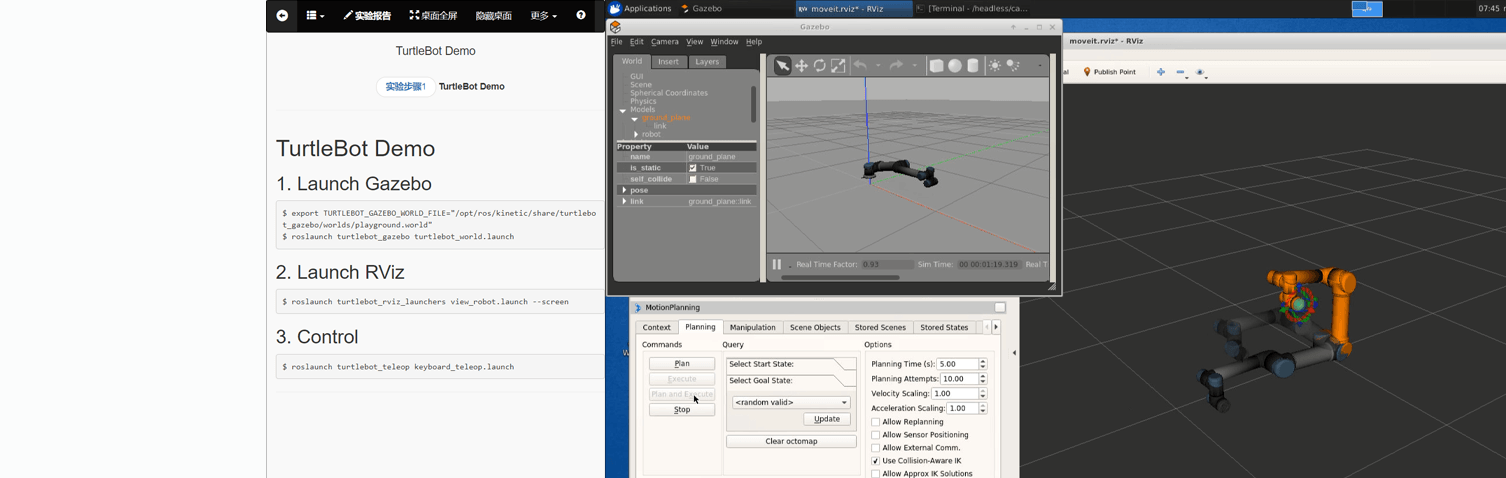
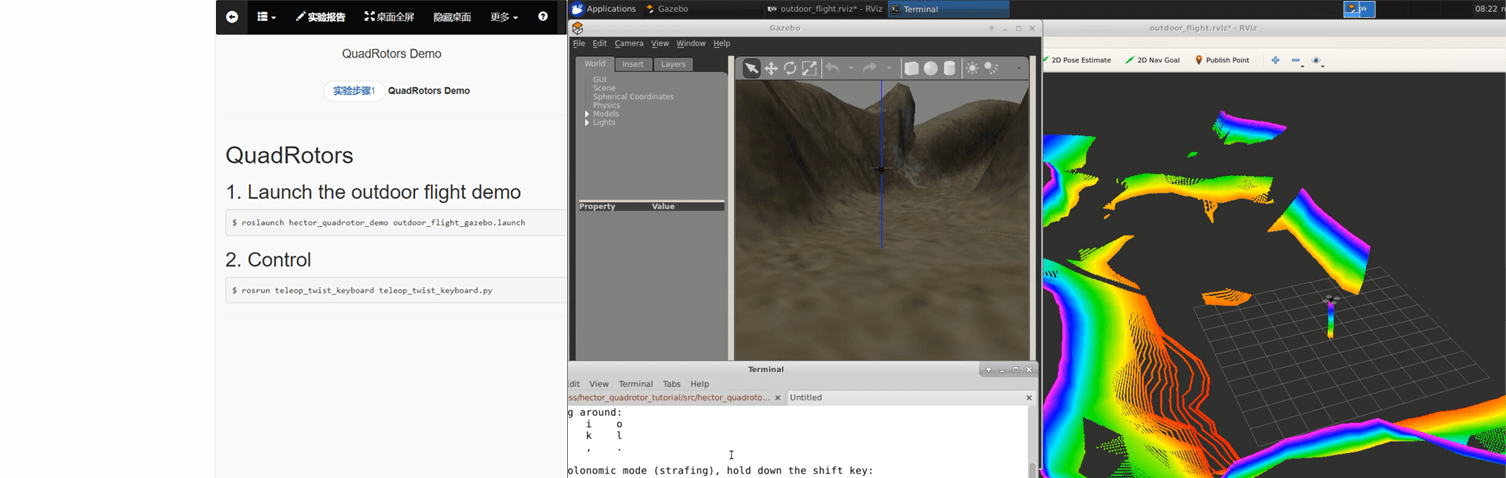
基于希冀云桌面实验平台,为学生提供了“开箱即用”的机器人在线实验环境。实验页面分左右两栏,左栏为实验指导手册,右栏为已安装好ROS机器人操作系统的云桌面实验环境。在云桌面实验环境内,安装了实验所需的各类仿真软件,集成了各实验所需的实验支撑材料。
- 科研级仿真实验环境
-
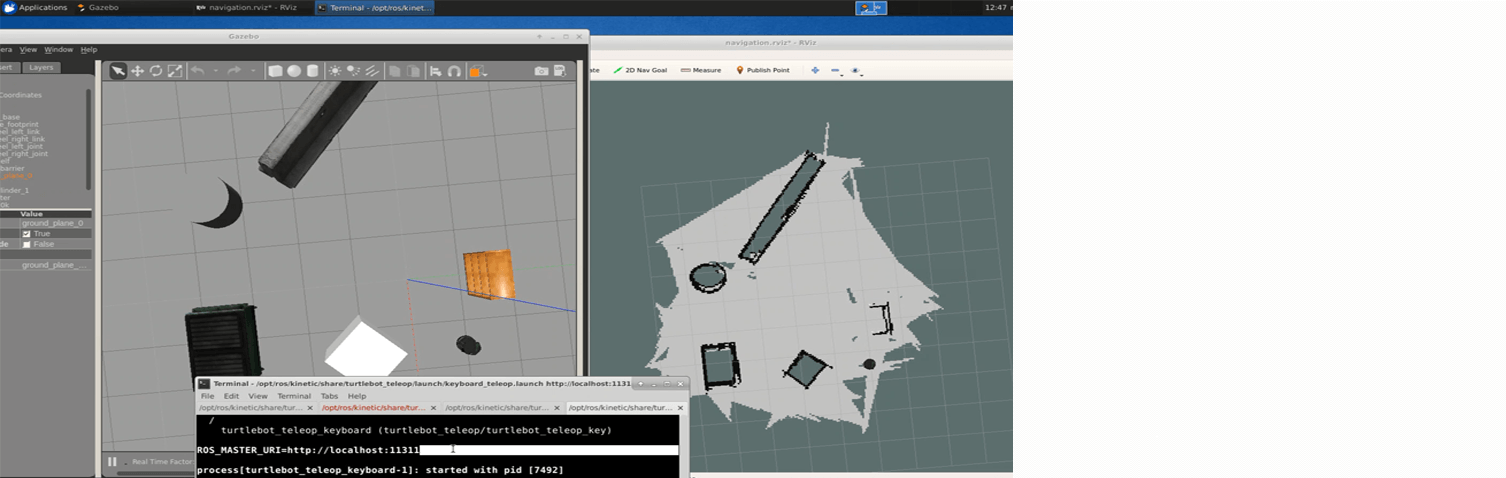
在云桌面实验环境内,提供智能控制、强化学习、机器人等科研领域相关期刊和会议所广泛采用与认可的仿真环境。
机器人仿真环境可快速、低成本、高安全性地验证机器人在结构设计、运动控制、轨迹规划、智能控制、复杂逻辑、高层AI算法等方面的工作在原理层面的有效性。
- 仿真环境支持GPU加速
-
支持将GPU直通到云桌面仿真实验环境中,基于GPU,既可提升深度学习和强化学习相关算法的训练效率,又可以加快复杂仿真环境的图形渲染速度。
- 支持多种类型机器人
-
在科研级仿真实验环境内,提供了轮式机器人、机械臂、双足机器人、固定翼无人机、多旋翼无人机、自动驾驶汽车、无人驾驶小车等机器人模型。
- 提供多种仿真实验环境
-
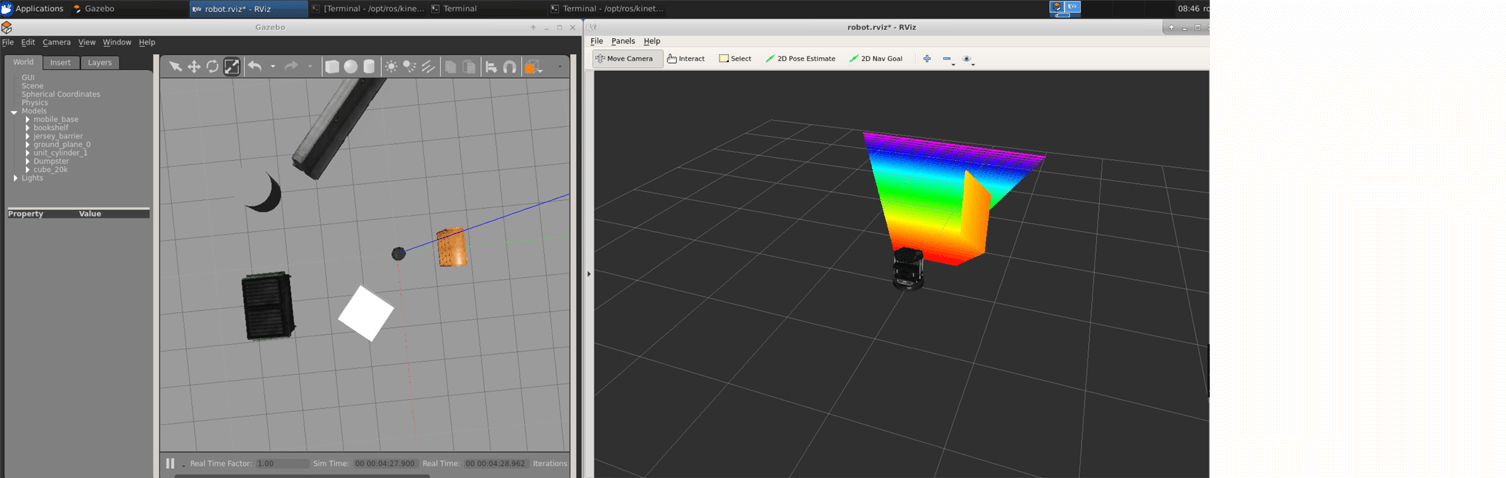
通过希冀云桌面实验平台,提供多种仿真实验环境:
Gazebo机器人仿真环境 RViz三维可视化平台 MoveIt!机器人运动控制平台 Webots机器人仿真平台 V-REP机器人仿真平台 ADAMS移动机器人仿真平台 OpenAI Gym强化学习环境 Mujoco机器人仿真环境 PyBullets机器人仿真环境 Matlab机器人仿真环境 OpenAI、ROS、Gazebo联合机器人仿真环境 Matlab、ROS、Gazebo联合机器人仿真环境 AirSim、Rotors Simulator、大疆DJI-Mavic等固定翼和多旋翼无人机智能飞行控制仿真环境 LGSVL、Autoware、Appolo自动驾驶仿真环境 Unity无人驾驶小车仿真环境 TurtleBot2、TurtleBot3等轮式机器人模型 UR3、UR5、PR2等机械臂模型 Husky与UR5构成的移动机械臂协作机器人模型
云机器人实验平台(虚实结合)
- 在实体机器人上远程运行程序
-
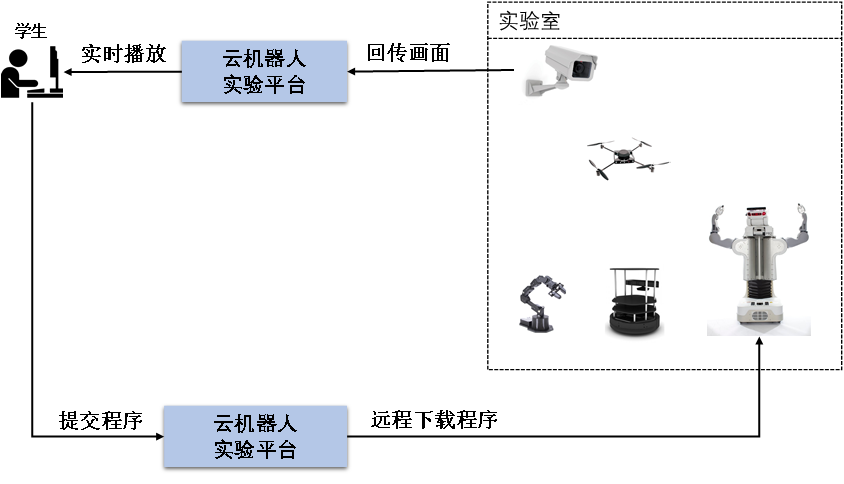
在实验环境中,学生可远程连接线下的实体机器人。学生在仿真实验环境中编写的程序和训练的模型,可通过网络远程下载到位于实验室的实体机器人的下位机中,控制机器人的运行。
- 实体机器人运行过程实时播放
-
采用网络摄像头拍摄实体机器人现场运行画面,并将画面传送到学生的桌面实验环境中播放。学生通过命令下载代码后,可直接在桌面实验环境中观察到实体机器人的实时运行状态。
- 不绑定不依赖特定实体机器人
-
云机器人实验平台不绑定、不依赖任何特定实体机器人,可对接高校实验室现有实体机器人。教师可将实体机器人仿真模型导入云桌面后,一键保存生成自定义的实验环境。然后,可以在自定义的实验环境上构建虚拟结合的课程实验体系。
实验体系
-
面向提升学生智能控制与机器人工程实践能力的实验体系,提供多门实验课程,包括:
课程列表 点击课程名称,可以查看对应的实验列表 ROS编程与实践 机器人系统仿真 机器人运动控制 机器人感知系统 机器人运动规划 机器人自主导航 机械臂智能控制 无人机智能飞行控制 自动驾驶 无人小车智能控制 ... ...