人工智能教学与实践支撑平台
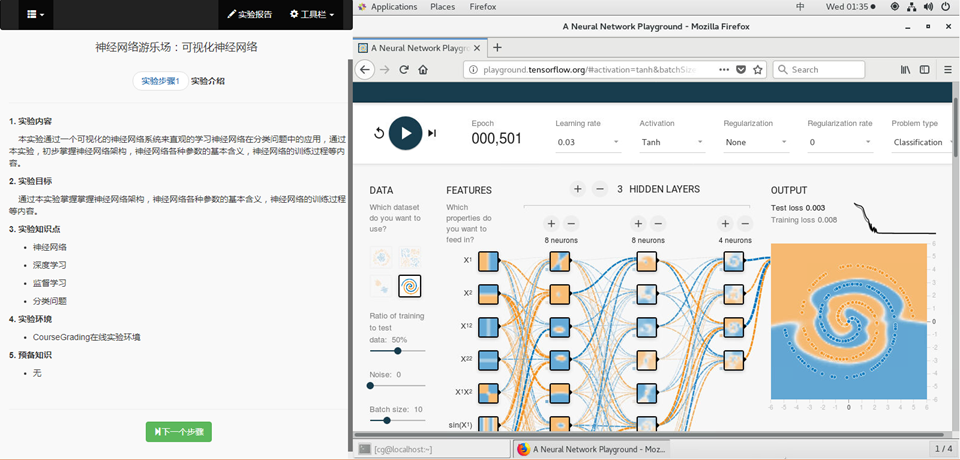
- 虚拟桌面在线实验环境
-
学生直接在浏览器上进行实验,界面分为左右两栏,左栏为实验指导书,右侧为一个真实的虚拟机环境。无需配置繁琐的本地环境,随时随地在线流畅使用,极佳的用户体验。 深入了解
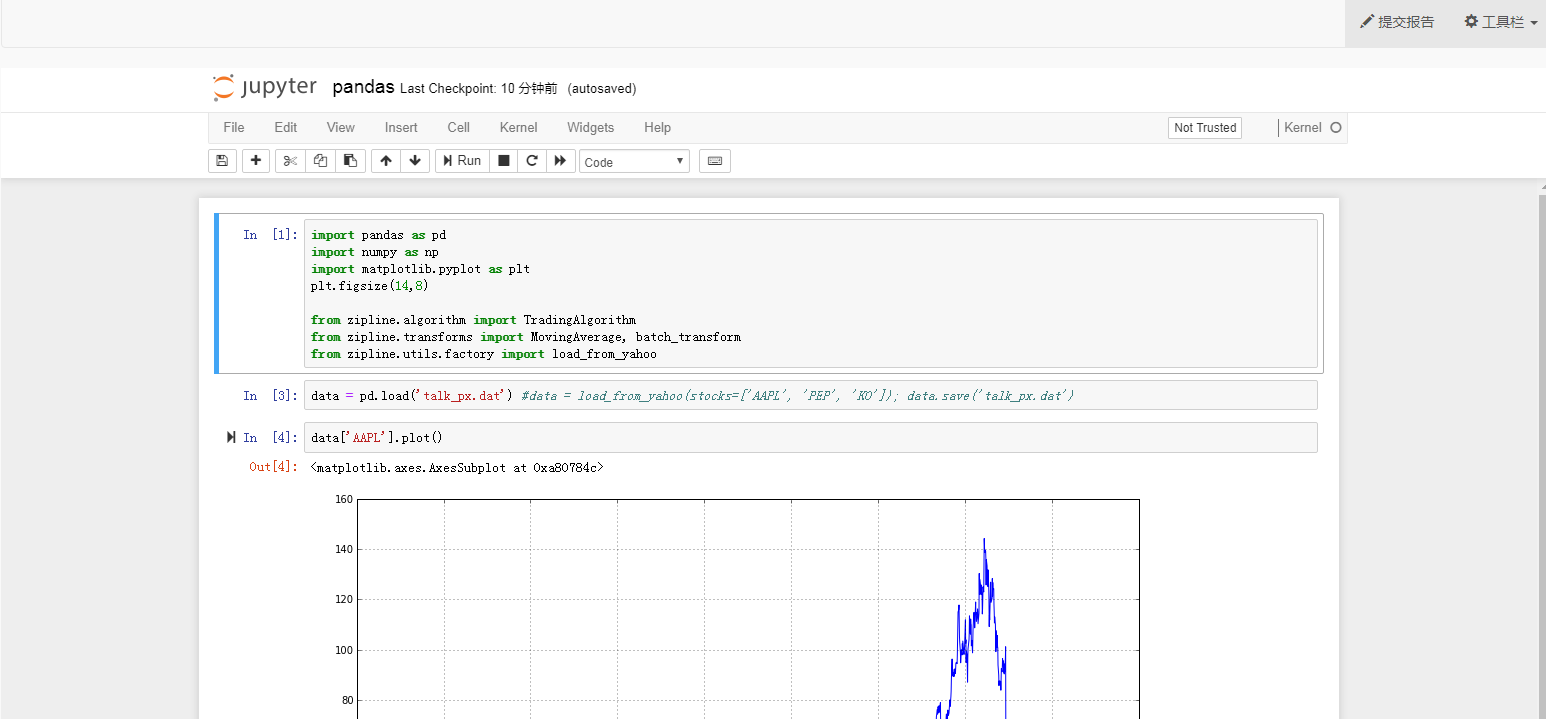
- Jupyter 在线实验环境
-
使用Jupyter撰写实验报告,简化交互式计算与数据分析类实验。实验文档与执行代码收归一处,极好的用户体验。
基于Docker技术进行用户隔离,CG系统自动进行负载均衡和资源分配。
深入了解 - 完善的课程管理与考试平台
-
支撑所有人工智能专业的教学与实践,实现在线资源的统一管理。
支持各类题型(填空、选择、判断、文件上传、简答、编程等)、在线作业、在线实验、在线考试、在线答疑等课程管理功能,支持MOOC视频播放。 - 代码自动评判
-
利用代码自动评判功能支持人工智能专业基础课程(Python、Java等)编程语言教学, 深入了解
- 教育大数据沉淀
-
CG平台完整汇集学生在整个培养阶段的学习过程数据、项目实践数据、考试成绩数据,为本校的教育人工智能研究提供数据支撑。
CG人工智能解决方案特色
一门课仅需一台服务器。基于虚拟机多用户共享,和CPU/GPU计算资源的动态调度技术,极大节约计算资源,一台服务器支撑300人同时在线实验。 深入了解
| CG人工智能 | 其它 | |
|---|---|---|
| 软件平台与硬件松耦合 |
独立建设、独立维护升级换代 |
一体机模式,与服务器和虚拟化软件紧耦合 |
| 对专业支撑的全面性 |
支撑人工智能课程体系内所有课程的教学与实验。 详情 |
昂贵的软硬件,只能做有限的人工智能实验,无法支持课程体系内其它课程的实验,例如数据库、编程语言、操作系统等 |
| 资源的可扩展性 |
轻松自建教学与实验资源 |
教学与实验资源固化 |
| 实验环境 |
1.B/S架构图形桌面,客户端分辨率自适应。 2.支持 Jupyter 实验环境。覆盖人工智能入门与通识教育。 |
C/S架构或者命令行界面 |
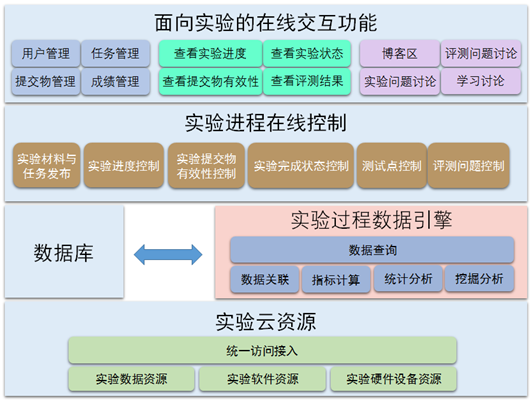 基于云计算技术,实验所需数据、软件共建和硬件实验设备均抽象为实验资源,提高了软硬件资源利用率,并利于系统维护和升级换代。
基于云计算技术,实验所需数据、软件共建和硬件实验设备均抽象为实验资源,提高了软硬件资源利用率,并利于系统维护和升级换代。
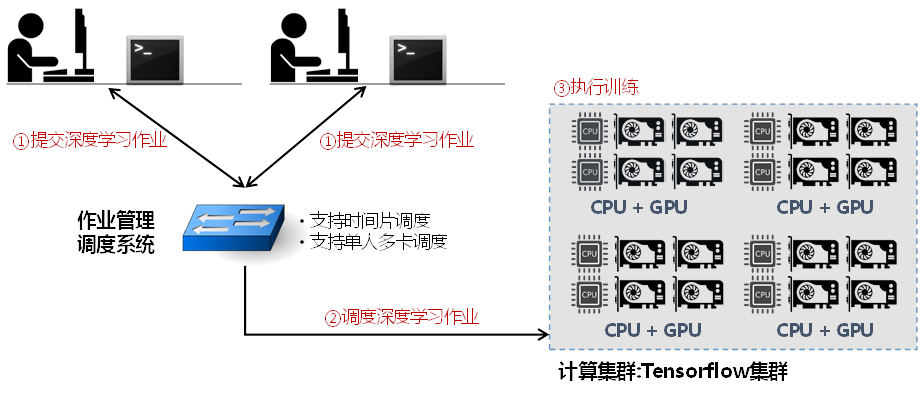 对于人工智能实验中的深度学习作业,CG平台支持GPU加速卡,以提升模型训练效率。对于学生提交的深度学习作业,由作业调度和管理系统统一调度到由CPU+GPU构成的高性能异构集群上执行训练过程。
对于人工智能实验中的深度学习作业,CG平台支持GPU加速卡,以提升模型训练效率。对于学生提交的深度学习作业,由作业调度和管理系统统一调度到由CPU+GPU构成的高性能异构集群上执行训练过程。
支持vGPU调度
对于人工智能实验中的深度学习作业,平台支持GPU加速卡,以提升模型训练效率。对于学生提交的深度学习作业,由作业调度和管理系统统一调度到由CPU+GPU构成的高性能异构集群上执行训练过程。
- 希冀平台实现了对GPU资源的三种调度方式
-
vGPU调度。基于vGPU技术,实现将GPU水平拆分成多个虚拟GPU,各个虚拟GPU中各自拥有独立的计算和显存资源,多人同时使用互不干扰,大幅度提升GPU的利用率。
时间片轮转调度。当学生人数大于GPU数量时,时间片轮转策略是公平分配GPU资源的最佳策略。时间片轮转的调度方式可实现少量GPU卡支持多个学生同时进行深度学习实验的需求。
单人多卡的调度模式。支持使用GPU集群的方式加提升单个模型的训练效率,使学生具备开展大型深度学习实验的计算环境。
高质量的教学资源
人工智能课程体系内相关课程: Python实训 数据库实验 算法与数据结构 大数据
部分人工智能课程实验资源:机器学习、深度学习、自然语言处理、人工智能数学基础、智能控制机器人、智能计算系统、智能应用系统综合设计
B/S架构的虚拟桌面在线实验环境
Jupyter在线实验环境
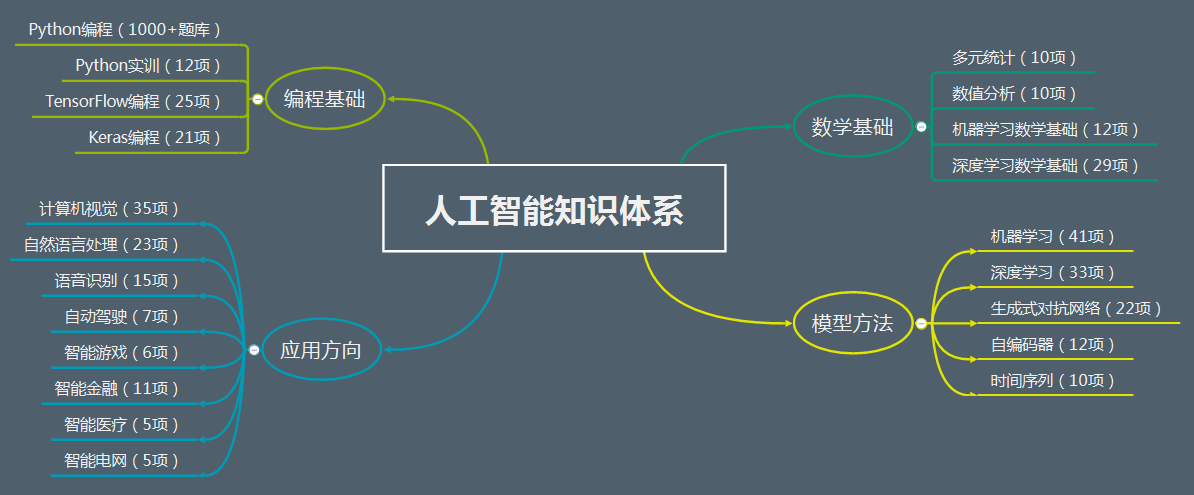
人工智能实验体系
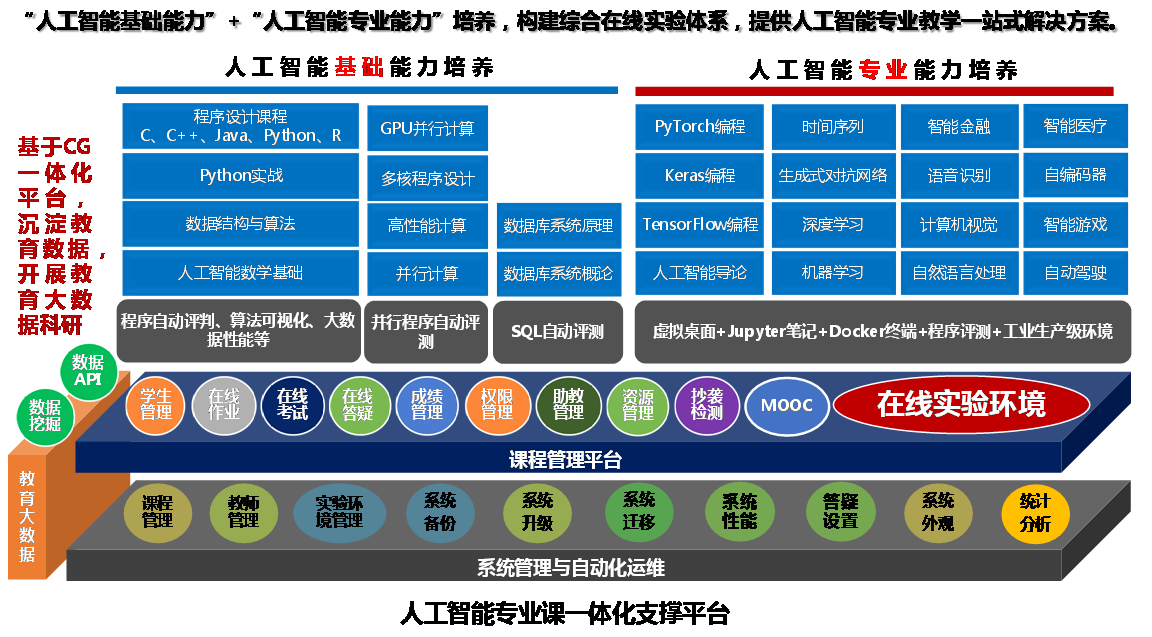
人工智能专业一体化支撑平台
CG教学平台高校教师QQ群
QQ群号:214085215 (仅限教师,请注明:学校+姓名)